[IrisToolbox] for Macroeconomic Modeling
Stacked time solution method with first-order terminal condition
jaromir.benes@iris-toolbox.com
Overview
- Creating a stacked time system
- Simulation procedure and terminal condition
- Changes in information sets
Model equations
System of \(n\) dynamic conditional-expectations equations
where
- \(n\) is the number of model equations
- \(x_t\) is an \(n \times 1\) vector model variables
- \(\mathrm E_t\!\left[\cdot\right]\) is a conditional expectations operator
- \(k\) is the maximum lag
- \(m\) is the maximum lead
Stacked time setup
-
Simulation range \(t=1, \dots, T\)
-
Drop the expectations operator
-
Stack the \(n\) equations for the \(T\) simulation periods
-
Create a large static system of \(T\times n\) equations in \(T\times n\) unknowns
-
Known initial conditions \(x_{1-k}, \dots, x_{0}\)
-
Unknown terminal conditions \(x_{T+1}, \dots, x_{T+m}\)
Stacked time system of equations and unknowns
- A total of \(n \cdot T\) equations
- A total of \(n \cdot T\) unknows, \(x_t,\ t = 1, \dots, T\)
Simulation setup
Initialize
- Create an \(n\times (T+k+m)\) matrix
- Fill in initial condition in columns \(1, \dots, k\)
In each iteration
- Fill in the simulation range columns
- Taking the last simulation range columns as initial condition, use the first order simulator to fill in terminal codnition
- Evaluate the LHS–RHS discrepancy for all \(n\times T\) equations and send this information to the solver
Visualization of the simulation setup
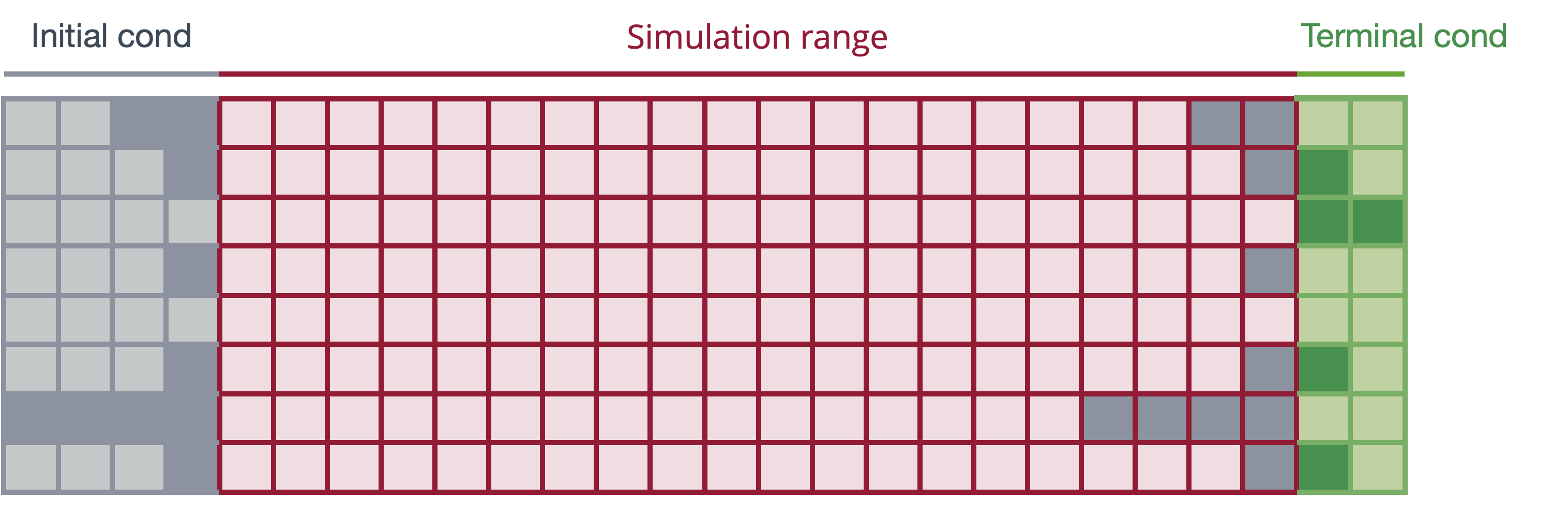
Terminal condition derived from first-order solution
First-order solution of the model (model-consistent expectations of endogenous variables integrated away)
Create a stacked system to calculate the terminal condition points needed $$ \begin{bmatrix} x_{T+1} \[5pt] \vdots \[5pt] x_{T+m} \end{bmatrix} = T^\mathrm{term} \begin{bmatrix} x_{T+1-k} \[5pt] \vdots \[5pt] x_{T} \end{bmatrix} + K^\mathrm{term} \notag $$
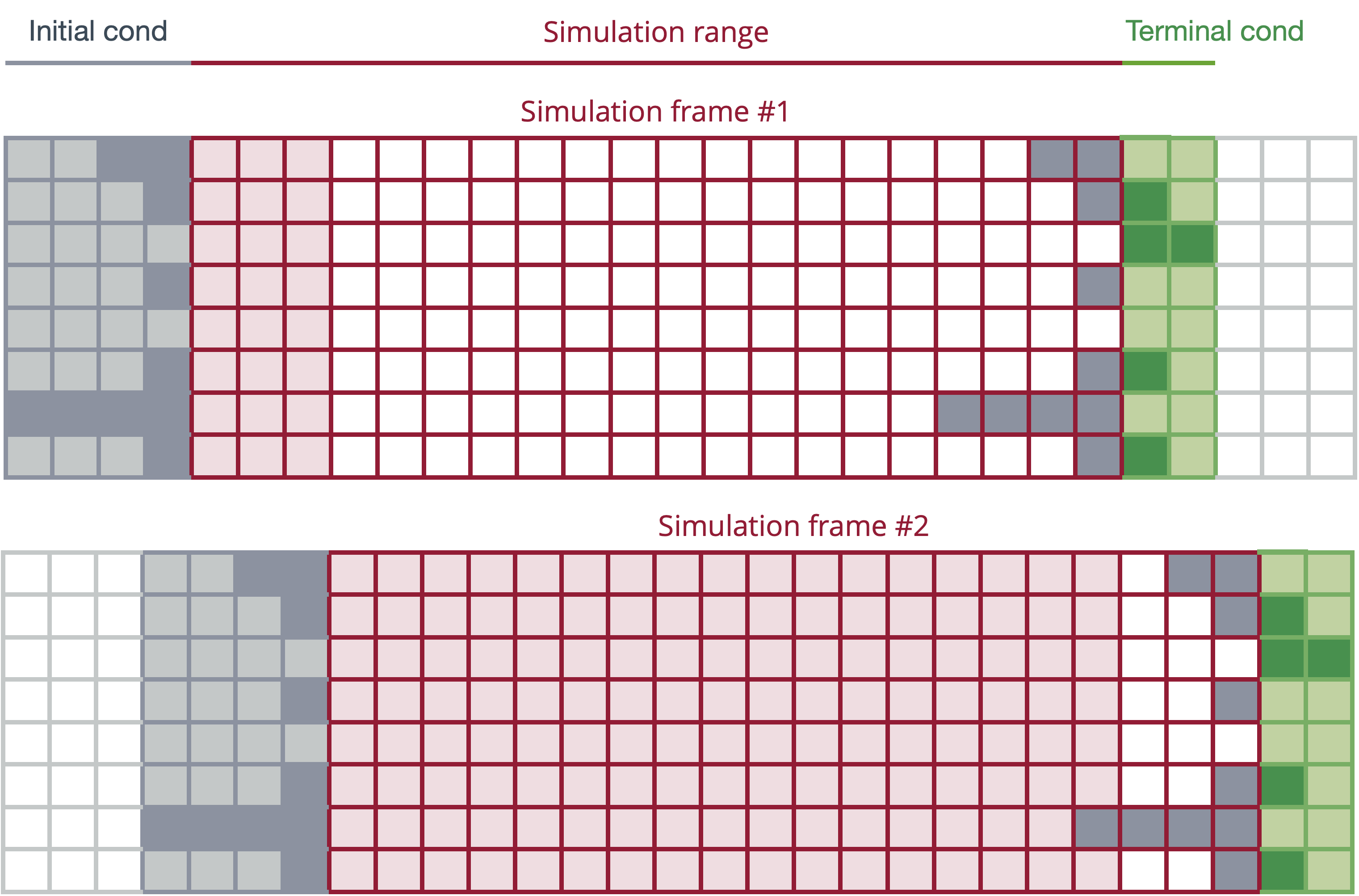
Changes in information sets within a simulation
-
By design, a stacked time simulation is consistent with an assumption of all future events (shocks, swaps) are anticipated
-
To simulate a sequence of unanticipated events, the simulation needs to be broken down into a sequence of sub-simulations (simulation frames)
Breakdown of simulation into frames
Implemenation in IrisT
Syntax of the simulate function for the stacked time method
[outputDb, info, frameDb] = simulate( ...
model, inputDb, range ...
, method="stacked" ...
);
Output structure info
Auxiliary output databank with simulation frames frameDb
Options to control the setup of the stacked time method
startIter=
"firstOrder"(default)"data"
terminal=
"firstOrder"(default)"data"